三维激光扫描在风貌保护工作中的应用
项目概况
这是一片建在悬崖上的古建筑群,共有近六百户人家。高崖两千年前就已存在,一千多年前就已在此建房安家。
本次项目是对古建筑群建筑进行三维扫描测绘,获取三维点云数据。依据三维点云数据制作古建筑群建筑平面图、立面图、剖面图;根据照片以及三维点云数据制作古建筑群建筑三维模型。同时对该区域进行倾斜航飞,制作倾斜模型。
作业范围

本项目测绘区域为古建筑群,古建筑群长约375米,宽约222米,占地面积约56400平方米。本次测绘对象为古建筑群内部建筑以及建筑周边环境。古建筑群共有建筑约500多栋,其中建筑完好的约有260栋。
工作内容
我司承担古建筑群内部建筑的三维测绘,同时制作指定建筑的全景图。根据三维测绘的点云数据制作指定建筑的平面图、剖面图、立面图以及三维模型。针对古建筑群范围内进行倾斜航飞并制作地形图与倾斜模型。
1. 建筑三维扫描测绘
对古建筑群内部建筑进行三维扫描,获取建筑内部、外部三维点云数据。
2. 建筑平面图、剖面图、立面图绘制
根据扫描的三维点云数据绘制建筑平面图、剖面图、立面图。
3. 建筑三维模型制作
根据扫描的三维数据以及拍摄现场的高清影像,制作建筑内部、外部三维模型。
4. 建筑内外全景拍摄
对建筑内部、外部进行全景拍摄。
5. 古建筑群范围倾斜航飞
对古建筑群范围进行无人机倾斜航飞,制作倾斜航飞模型与正射影像。
设备投入
01. 外业仪器设备投入情况

02. 内业仪器设备投入情况

静态三维激光扫描
01、方案技术流程图

02、三维激光扫描测绘要求
扫描站的布设应符合下列要求:
1、扫描站应设置在视野开阔、地面稳定的安全区域;
2、扫描站扫描范围应覆盖整个扫描目标物,均匀布设,尽量减少设站数目;
3、目标物结构复杂、通视困难或线路有拐角的情况应适当增加扫描站;
4、需要搭设平台时,应保证平台稳定和仪器、人身安全。
点云数据采集
点云数据采集应满足下列要求:
1、作业前应将仪器放置在观测环境中30分钟以上;
2、扫描作业时,应符合下列规定:
1)点间距或采集分辨率应设置12mm@10m以上,应满足相邻测站间有效点云的重叠度不低于30%,困难区域不低于15%的要求。
2)应根据项目名称、扫描日期、扫描站号等信息命名扫描站点,存储扫描数据,并在大比例地形图、平面图或草图上标注测站位置。
3)设有标靶的测站应进行标靶的识别与精确扫描。
4)扫描过程中出现断电、死机、仪器位置变动等异常情况时,应初始化扫描仪,重新扫描。
3、扫描作业结束后,应将扫描数据导入电脑,检查点云数据覆盖范围完整性、标靶数据完整性和可用性。对缺失和异常数据,应及时补扫。
纹理图像采集
纹理图像数据采集应符合下列要求:
图像的拍摄角度应保持镜头正对目标面,无法正面拍摄全景时,先拍摄部分全景,再逐个正对拍摄,后期再合成;
宜选择光线较为柔和、均匀的天气进行拍摄,避免逆光拍摄,能见度过低或光线过暗时不宜拍摄;
数据预处理以及导出
数据预处理使用Faro自带拼接软件SCENE。处理流程包括点云数据配准、降噪与抽稀、图像数据处理。
1、点云数据配准
根据不同的作业方法,可选择控制点、标靶、特征地物进行点云数据配准,本次扫描采用无标靶拼接,使用ICP算法自动配准。
2、降噪与抽稀
降噪与抽稀应符合下列规定:
点云数据中存在脱离扫描目标物的异常点、孤立点时,应采用滤波或人机交互进行降噪处理;
点云数据抽稀应不影响目标物特征识别与提取,且抽稀后点间距应满足的要求。
3、图像数据处理
图像数据处理应包括图像色彩调整、变形纠正、图像配准、格式转换,同时应符合下列要求:
图像出现曝光过度、曝光不足、阴影、相邻图像间的色彩差异等现象时,应进行色彩调整保持图像反差适中、色彩一致;
因视角或镜头畸变引起变形影响使用时,应对图像的变形部分作纠正处理;
图像配准时,应保证图像细节表现清晰;
宜将处理后的图像转换为通用的文件格式;
处理后的图像应与实地情况相符,真实反映实际材质的图案、质感、颜色及透明度。
4、点云数据导出
完成预处理之后点云即可导出至第三方软件进行线画图与三模型制作。本次项目输出两种格式点云LAS与RCS格式。分别用作建筑线画图绘制与三维模型制作。
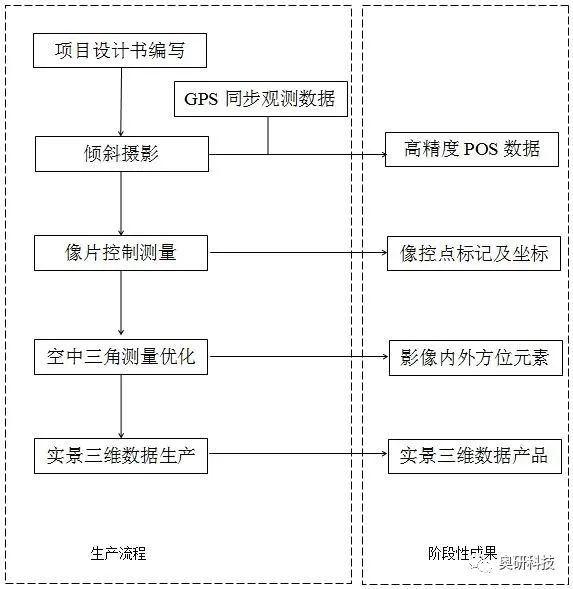
无人机倾斜航飞
01. 方案技术流程图
02. 各工序的作业方法
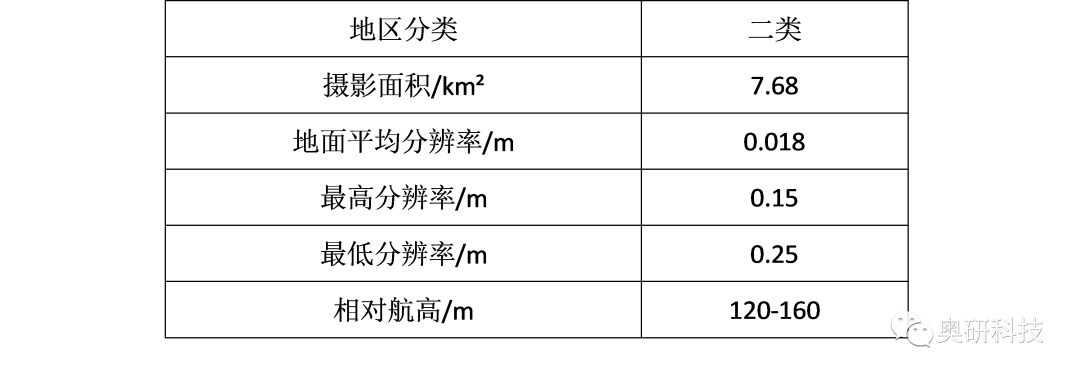
利用倾斜数字测绘航空摄影系统可形成实景三维数据产品的有效范围约为0.06平方公里,数据产品有效范围约0.06平方公里,范围如下:

航摄技术基本设计
1) 季节要求:
测区处在中亚腹部,属暖温带大陆性干旱气候带。境内四季分明、光照长、气温的年变化和日变化均较大,降水少,蒸发旺盛。夏季炎热,但酷暑期短;冬无严寒,但低温期长;春夏多大风、沙暴、浮尘天气。年平均气温11.8℃;最冷月1月份,平均气温-6℃左右;最热月7月份,平均气温26℃左右。年日照2650小时,无霜期224天,年降水量仅65毫米左右,年蒸发量高达2100多毫米。
2)航摄基本技术参数设计:
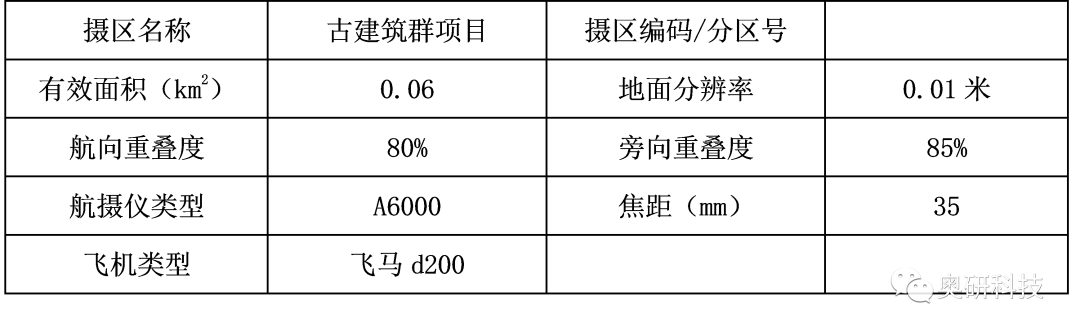
摄区倾斜摄影基本技术要求相对航线高度58m-64m
3)航摄范围覆盖:倾斜摄影航向安全因子设定为150%,旁向安全因子设定为100%。
4)像片重叠度:飞马D200倾斜摄影平均航向重叠85%,旁向重叠80%。
5)飞行参数:根据项目要求,并结合使用飞机、航空数字相机系统的自身性能指标,制定各飞行参数。
基本飞行的相关参数(航摄因子表)如下图所示:
航摄因子表(飞马D200)
航测数据处理
1) 数据下载:
航摄飞行完成,要及时对数据进行下载,原始数据经下载步骤被分离成单独影像数据、位置和姿态数据、飞行信息数据。
2) IMU/GPS数据处理:
采用Inertial Explorer软件将同步观测的CORS基站数据采用差分GPS方法对IMU/GPS数据进行联合解算,并填写相应的数据处理检查手簿和飞行数据检查结果分析表。按规范要求平面偏差不大于0.08m、高程偏差不大于0.3m、速度偏差不大于0.4m/s。
3) 数据整理:
影像文件为JPG格式,文件名称与航片编号一致。航空摄影数据采用硬盘存储,硬盘包装盒标签的注记内容包括:摄区名称、摄区代号、航摄仪类型及其编号、航摄仪主距、航摄时间、航线数和航片数、航摄面积、地面分辨率、航摄单位、硬盘编号、数据类型、航线号、起止片号。
像片控制测量
测区实景三维数据生产项目的倾斜摄影数据具备IMU/GPS资料,航向重叠度为85%,旁向重叠为80%,在空中三角测量中依赖于像控点密集程度。
实景三维数据生产
1、实景三维数据生产流程

ContextCapture中每个Tile的实景三维数据生产都分为以下几个步骤:
a.建立影像金字塔
b.创建像对文件
c.提取点云
d.构建不规则三角网
e.优化三角网
f. 简化三角网
g.选择三角网对应贴图
h.排列及合并贴图到一张或多张贴图文件内
i.坐标系统转换
ContextCapture软件在进行实景三维数据生产时,默认采用了局部笛卡尔三维坐标系统。坐标系统的原点位于测区范围的中间,Z值的起点为测区高程最低值。
用户也可以手动选择输出成果坐标系为内置的4000多个标准EPGS坐标系(包含CGCS2000等坐标系),或导入prj文件自定义坐标系。

航飞成果
三维模型制作
01. 方案技术流程图
流程图

02. 建模内容以及要求
本次建模内容包括古建筑群各个建筑可见的主体结构,如墙、柱、梁、楼板、楼梯、天花、门、窗等。内部装饰花纹以及装饰雕刻可用贴图表示。
模型纹理要求
纹理文件存放必须与相对应的 max 文件放在同一目录下。
贴图使用 jpg 或png文件格式,贴图像素必须符合 2 的幂次方,如 32×32、 64×128 等。最大尺寸不得超过1024×1024,最小尺寸不得小于 16×16。在满足分辨率及符合实际比例的前提下,应使用小尺寸贴图。
为保证贴图呈现的效果真实生动,贴图应使用Photoshop软件经过“亮度/对比度”,“色相饱和度”,“色阶”等图像调整操作处理。


三维模型成果
建筑平立剖绘制
01. 方案技术流程
流程图

02. 建筑图绘制
扫描仪的数据密度与扫描时选择的分辨率有很大关系。分辨率设置直接影响激光束的密度、最终数据量大小以及扫描时间。
为了能将场景扫描完整,必然相邻测站之间会有大量重叠数据。同一区域会被不同测站位置的站点多次测量,这就导致了数据冗余。而且扫描仪的数据特点是近处密远处稀,这就要求我们在点云分析之前要对数据进行优化。优化的方法是将所有测站合并,然后根据数据点的间距进行采样。
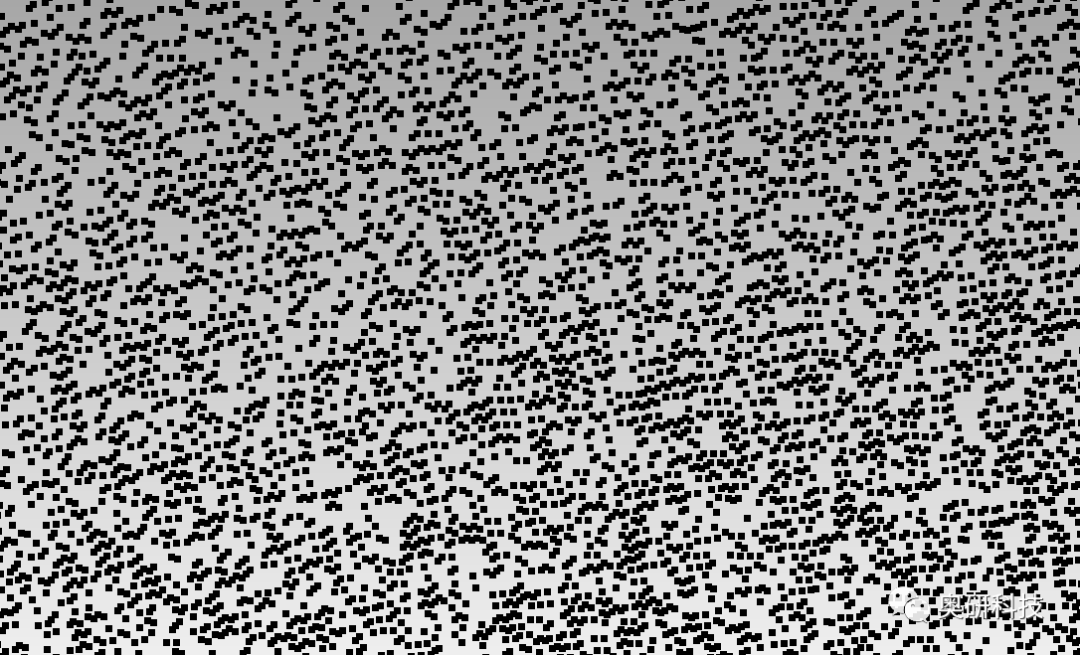
采样前

采样后
通过均匀化采样既降低了数据大小又优化了数据结构,为后期数据分析提供了优质的数据源。本次项目点云采样为1cm。
2、导入PointCab软件绘制建筑图纸
将点云数据导入PointCab软件,Pointcab软件可以将点云沿着任意方向制作剖切面投影,并生成DWG格式。
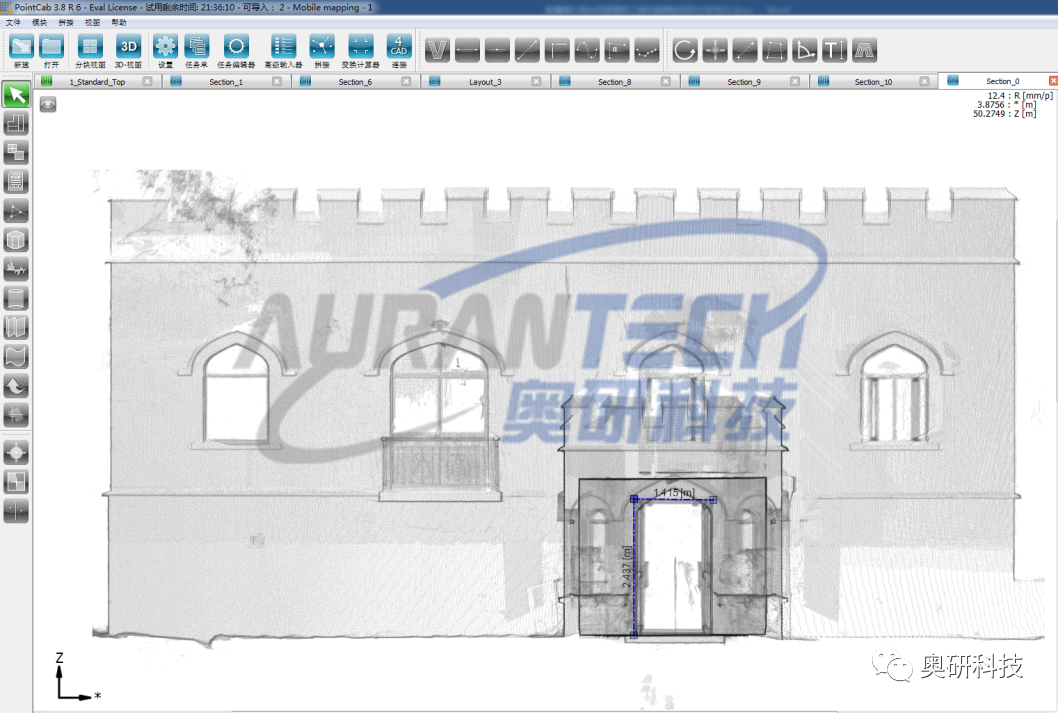
建筑立面投影
生成建筑立面投影图之后即可在CAD中进行立面、剖面图的绘制。

图纸描绘

建筑图成果
全景实景浏览制作
01. 方案技术流程
流程图

02. 全景相机布测
全景相机的布设应符合下列要求:
1、全景相机的布设应设置在视野开阔、地面稳定的安全区域;
2、全景相机的布设范围应覆盖整个扫描目标物,均匀布设,尽量减少设站数目;
3、目标物结构复杂、通视困难或线路有拐角的情况应适当增加布设;
4、需要搭设平台时,应保证平台稳定和设备、人身安全。

全景导览图成果
难点与应对措施
古建筑群内部错综复杂,房屋共用墙体情况比较普遍。如何能准确测出墙体厚度是一大难题。本项目采取区域联合扫描的方式,将整个测区划分为若干区块,每个区块为黏连的几栋房屋。区块内部做建筑内部、外部的联合扫描,这样可以很好解决共用墙厚无法测量的问题。
建筑内部光照不足,无法满足全景相机与单反相机的拍摄条件。我们在现场增加柔光灯的形式进行现场补光,获取清晰的纹理与全景影像。
该地区气候光照条件极好,这样容易导致无镜头采集的影像过曝,针对上述情况我们选取了不同天气条件下的早、中、晚三个时段进行多次航飞,在成果中甄选最佳效果以保证影像质量。
项目总结
将三维激光扫描技术和无人机航拍技术应用到风貌保留建筑保护工程中,可以有效拓展三维激光扫技术的应用领域和深度,极速及高效地提高对建筑中复杂的结构的还原,获得传统二维数据无法比拟的优势。
通过三维激光扫描将建筑内外部信息及细节完整复刻后通过软件生成1:1的三维模型及建筑的现状图,使设计改造可以完全根据模型及图纸进行建筑设计,施工方也可通过全景图来对比施工工人是否按照原貌进行修缮,极大的加快了设计的效率及施工的准确性。



