
3D SLAM 激光影像背包测绘机器人

3D SLAM激光全景背负式机器人利用RTK-SLAM™ 技术高效获取高精度的真彩色点云模型,实现室内多层连续扫描建模,室外大范围场景一次性连续扫描和处理,提高作业效率,获得全要素数据成果。
3D SLAM激光全景背负式机器人共分为2大系列6个版本,Premium版本系列分别是全景相机版(SR-DLP6)、双激光版(SR-DL6)、单激光版(SR-SL6),Lite版本系列分别是全景相机Lite版(SR-DLP6-Lite)、双激光Lite版(SR-DL6-Lite)、单激光Lite版(SR-SL6-Lite)。
3D SLAM激光全景背负式机器人全系标配16线激光雷达,Plus版本,全部采用32线、200米的长距激光雷达,满足用户在大范围区域、高楼层等应用场景的数据获取需求。
Premium版系列

Lite版系列

单激光版(SR-SL6)和单激光Lite版(SR-SL6-Lite)既可以背负又可以手持,一机多用,满足不同场景应用需求。

应用领域
1、室内建模、制图
2、室外大比例尺制图
3、建筑BIM
4、地铁隧道工程
5、地下人防工程
6、数字矿山、矿井
7、林业资源普查管理
案例分享
一、高精室内地图构建与定位导航:
3D SLAM激光影像背包测绘机器人具有采集方便、精度高等特点,可以为任何建筑物,包括住房、办公室、商场、工业厂房、公共场所等进行高精度室内地图构建,并且依据高精室内地图可以在室内地下等无GPS信号覆盖的环境中进行高精定位与导航。
效果图如图所示:

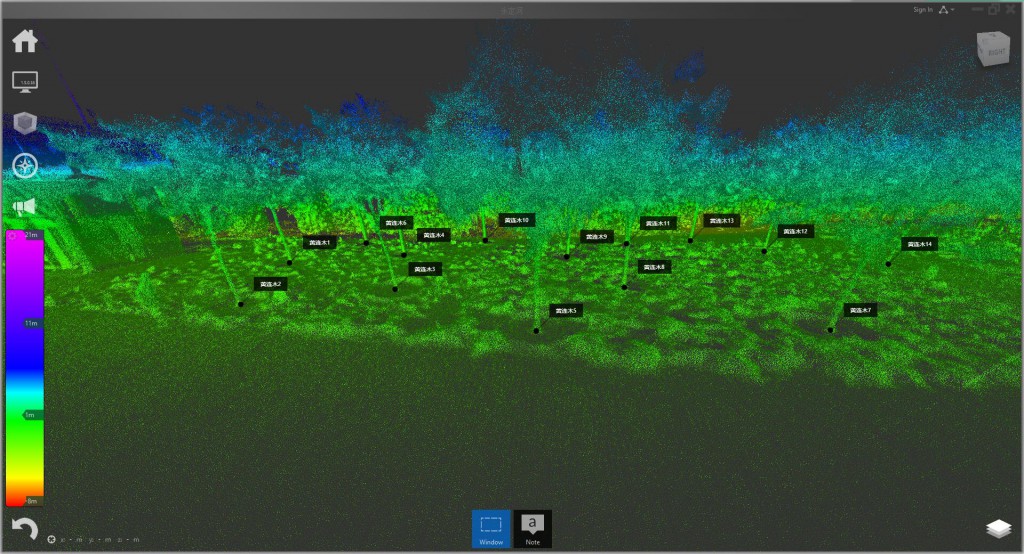
二、林业资源普查与管理:
3D SLAM激光影像背包测绘机器人具有数据采集效率高、处理数据精度高等特点。同时,系统采用3D SLAM核心算法,并且设计为背包式的结构,具有良好的环境适应性,不受采集环境限制,因此可以用来获取林业基础数据,分析林木类型、林木分布情况、林木生长阶段概况、林木覆盖面积变化情况等。
在得到点云数据之后,可以基于该数据对树木等林业资源进行普查和管理,如图所示:
三、建筑工程项目中的BIM应用:
3D SLAM激光影像背包测绘机器人的特点包括高速的现场数据采集、高精度的数据处理和点云建模、POS自定位核心算法不依赖GPS信号和惯导的约束、室内/室外/地下/地上三维空间全地形作业等。
这些特性非常适合建筑工程施工行业的构数据每日动态数据采集、项目施工全过程结电子档案生成、工程现场物资堆放空间规划与管理、工程质量实时管控等BIM应用。
效果图如图所示:

四、电力和通讯铁塔巡检与管理:
电力铁塔和通讯铁塔是非常通用的长距离传输线缆的中继支撑平台。这些铁塔的选址复杂性较高,在市区、山区、农田、戈壁等不同地形地貌情况下,施工和使用单位都需要对它们进行巡查和监管。
除了常见的人工巡检外,近来,采用无人机结合激光和影像等自动化的巡查方法也逐渐成熟。于此同时,作为多地貌多地形的应用,地面激光和影像相结合的巡检方式也被广泛使用。这种地面数据采集方式可以更近距离、更精确地得到现场结构数据,对需要精确数据模型的管理和巡查类应用更为适用。
当然,传统的基于固定式三维激光扫描仪的作业模式效率非常低,参与作业人员较多;在保证精度的情况下,采用3D SLAM激光影像背包测绘机器人移动作业可以提高工作效率十倍以上,并只需一名作业人员,因此可以极大地缩短外业施工周期,提升整体项目收益。
效果图如图所示:


关注微信公众号
了解更多


沪公网安备31011802003543